NumPy Neural Networks
You can find this repository here
Overview
In an attempt to test and further my understanding of the mathematics and logistics behind neural networks and how they operate, I decided to follow what I learned in deeplearning.ai’s Neural Networks and Deep Learning course and implement Neural Networks from scratch using only NumPy.
Outline
To build a neural net from scratch, we need to go over each block and code those individually. At the end we can combine all of these to create an $L$-layer NN.
So, the steps we need to take are:
- Parameter Intialization: We need to initialize parameters $W$ and $b$
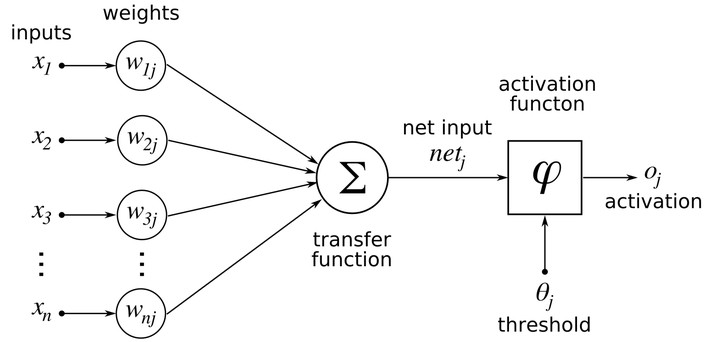
- Compute a forward propagation pass: This involves computing the linear pass - $Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}$ - and the activation $A^{[l]}=g(Z^{[l]})$ for both Sigmoid and ReLU activations
- Compute the loss
- Implement a back propagation pass
- Update the parameters: Here I'll code in mini Batch Gradient Descent (Which will cover both Stochastic Gradient Descent as well as Batch Gradient Descent), Momentum, RMSProp, and the king of them all, Adam
import math
import numpy as np
import matplotlib.pyplot as plt
Activation Functions
To add non-linearity to the model, activation functions are used. I’ll define them now. I’ll be using ReLU (rectified linear unit) and sigmoid in an example, but I’ll also define tanh and leaky ReLU.
def relu(Z):
"""
Arguments:
Z -- output of linear function Z = W*A+b
Returns:
ret -- ReLU(Z)
Z -- input for use in backprop
"""
return np.maximum(0,Z), Z
def sigmoid(Z):
"""
Arguments:
Z -- output of linear function Z = W*A+b
Returns:
ret -- sigmoid(Z)
Z -- input for use in backprop
"""
return 1./(1.+np.exp(-Z)), Z
def tanh(Z):
"""
Arguments:
Z -- output of linear function Z = W*A+b
Returns:
ret -- tanh(Z)
Z -- input for use in backprop
"""
return np.tanh(Z), Z
def leaky_relu(Z):
"""
Arguments:
Z -- output of linear function Z = W*A+b
Returns:
ret -- leaky_relu(Z)
Z -- input for use in backprop
"""
return np.maximum(0.01*Z, Z), Z
Parameter Initialization
For passing parameter information between different functions, I’ll use a dictionary parameters, which will store $W$ and $b$ values for each layer $l {l:{0\le l \le L}}$
Additionally, I’ll implement random, Xavier initialization, and He initialization.
- Random Initialization: Samples values from a normal distribution, and multiplies by a small value to keep weights close to zero - regularization
- Xavier Initialization: random sampling is multiplied by constant $\sqrt{\frac{1}{\text{previous layer dimension}}}$
- He Initialization: random sampling is multiplied by constant $\sqrt{\frac{2}{\text{previous layer dimension}}}$
def initialize_parameters(model_shape, initialization_method='he'):
"""
Initializes parameters W and b of a network of shape model_shape.
Arguments:
model_shape -- list containing the dimensions of each network layer l
Returns:
parameters -- dictionary containing weight and bias parameters
"""
#define dictionary
params = {}
#Obtain L
L = len(model_shape)
#Check initialization_method
if initialization_method == 'random':
beta = 0.01
for l in range(1,L):
params["W"+str(l)] = np.random.randn(model_shape[l], model_shape[l-1])*beta
params["b"+str(l)] = np.zeros([model_shape[l], 1])
elif initialization_method == 'xavier':
L = L-1
for l in range(1,L+1):
beta = np.sqrt(1./model_shape[l-1])
params["W"+str(l)] = np.random.randn(model_shape[l], model_shape[l-1])*beta
params["b"+str(l)] = np.zeros([model_shape[l], 1])
elif initialization_method == 'he':
L = L - 1
for l in range(1,L+1):
beta = np.sqrt(2./model_shape[l-1])
params["W"+str(l)] = np.random.randn(model_shape[l], model_shape[l-1])*beta
params["b"+str(l)] = np.zeros([model_shape[l], 1])
else:
raise NameError("%s is not a valid initalization method"%(initialization_method))
return params
Forward Propagation
Forward propagation refers to passing through the computation graph from left to right - forwards - and evaluating $Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}$ for each sucessive $l$ starting with $l=1$, in which case $A^{[0]}=X$, in other words, the activation fed into the first layer is simply the inputs.
To accomplish this, I’ll create two functions. The first will evaluate the linear formula $Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}$, whereas the second will evaluate $A^{[l]} = g(Z^{[l]})$, which corresponds to evaluating the activation function.
Then forward_prop implements both to complete a forward propagation pass.
In order to compute the backprop later onwards, I’ll need to store $A^{[l]}$,$W^{[l]}$, $b^{[l]}$ as well as $Z^{[l]}$ which I’ll do in linear cache and activation cache
One of the arguments of forward_prop is layer_activations, which is a list of the activations for each layer of the neural network.
def forward_linear(W,A,b):
"""
Linear part of forward propagation
Arguments:
W -- weight matrix
A -- activations
b -- bias matrix
Returns:
Z -- input to the layer's activation function
linear_cache -- tuple with A, W, b for efficient backprop
"""
Z = np.dot(W,A)+b
linear_cache = (A,W,b)
assert(Z.shape == (W.shape[0], A.shape[1]))
return Z, linear_cache
def forward_activation(Z, activation):
"""
Arguments:
Z -- Output of linear function Z = WA_prev+b
activation -- String denoting activation function to use. One of [linear, sigmoid, relu, leaky_relu, tanh, softmax]
Returns:
A -- g(Z), where g() is the corresponding activation
activation_cache -- the input Z, which will be fed into backprop
"""
if activation == 'linear':
A, activation_cache = Z, Z
elif activation == 'sigmoid':
A, activation_cache = sigmoid(Z)
elif activation == 'relu':
A, activation_cache = relu(Z)
elif activation == 'leaky_relu':
A, activation_cache = leaky_relu(Z)
elif activation == 'tanh':
A, activation_cache = tanh(Z)
else:
raise NameError('%s is not a valid activation function' %(activation))
return A, activation_cache
def forward_prop(X, layer_activations, parameters):
"""
Implements one pass of forward propagation
Arguments:
X -- input data
layer_activations -- list of strings corresponding to the activations of each layer
parameters -- output of initialize_parameters
Returns:
A - Output of activation function of the last layer
caches - list of caches containing both linear and activation caches
"""
#Define caches
caches = []
#A[0] is the input
A = X
L = len(parameters)//2
for l in range(1, L+1):
A_prev = A
W = parameters["W"+str(l)]
b = parameters["b"+str(l)]
Z, linear_cache = forward_linear(W, A_prev, b)
A, activation_cache = forward_activation(Z, layer_activations[l])
assert (A.shape == (W.shape[0], A_prev.shape[1]))
#Add both linear and activation cache to caches
caches.append((linear_cache, activation_cache))
return A, caches
Cost Function
The cost function is the metric that a neural net aims to minimize. I’ll implement cross-entropy cost, given by:
$$-\frac{1}{m} \sum\limits_{i = 1}^{m} (y^{(i)}\log\left(a^{[L](i)}\right) + (1-y^{(i)})\log\left(1- a^{[L](i)}\right))$$
Thus, we require a method of computing cost after one pass of forward propagation.
def cost(A_last, Y):
"""
Arguments:
A_last -- Post-activation value of the last layer of the network
Y -- Groud truth vectors
Returns:
cost -- cross-entropy cost
"""
#Get number of samples, m
m = Y.shape[1]
#Compute cross entropy cost
cost = -(1.0/m)*np.sum(Y*np.log(A_last)+(1.-Y)*np.log(1.-A_last))
#Ensure appropriate dimensions
cost = np.squeeze(cost)
return cost
Back Propagation
To update our parameters, we need to calculate the gradient of the loss with respect to $W$ and $b$
Just like with forward prop, I will implement two functions. One deals with the back pass for the linear part of the units and the other deals with the derivatives of the activation functions.
For the linear part, we take the derivatives of the parameters, obtaining:
$$ dW^{[l]} = \frac{1}{m} dZ^{[l]} A^{[l-1] T} $$ $$ db^{[l]} = \frac{1}{m} \sum_{i = 1}^{m} dZ^{[l](i)}$$ $$ dA^{[l-1]} = W^{[l] T} dZ^{[l]} $$
For the activation part, the backprop requires the gradient of the activation function. As such it depends on the activation used, and I’ll define them for each one.
For sigmoid:
$$ \sigma{(z)} = \frac{1}{1+e^{-x}}$$ $$\frac{d\sigma{(z)}}{dz} = \sigma{(z)}(1-\sigma{(z)})$$
For ReLU:
$$\text{ReLU}(z) = \max{(0,z)}$$ $$\frac{d\text{ReLU}}{dz} = \left\{\begin{array}{ll}1 , z > 0\\0, z \le 0\end{array}\right.$$
Note that for ReLU, strictly speaking, there is a discontinuity at $z=0$, however since it is incredibly unlikely that the input to the function will every be exactly zero, it’s fine to include it in $z\le0$
For tanh: $$\tanh{(z)} = \frac{e^{z}-e^{-z}}{e^{z}+e^{-z}}$$ $$\frac{d\tanh(z)}{dz} = 1-\tanh^2(z)$$
For leaky ReLU: $$\text{leaky ReLU}(z) = \max(0.01z, z)$$ $$\frac{d(\text{leaky Relu}(z))}{dz} = \left\{\begin{array}{ll}1 , z > 0\\0.01, z \le0\end{array}\right.$$
So, I’ll implement functions for each of these units to compute: $$dZ^{[l]} = dA^{[l]} * g’(Z^{[l]})$$
Additionally, to initialize backpropagation, we need $\frac{d\mathcal{L}}{dA^{[L]}}$, the gradient of the cost function with respect to the last activation output. For cross-entropy this is: $$-\sum\limits_{i=1}^{m}\frac{y^{i}}{a^{[L](i)}} - \frac{1-y^{i}}{1-a^{[L](i)}}$$
def backward_linear(dZ, cache):
"""
Arguments:
dZ -- Gradient of cost w.r.t linear portion
cache -- tuple coming from cached forward prop of layer l
Returns:
dA_prev -- gradient with respect to activation of previous layer
dW -- gradient with respect to weights of current layer
db -- gradient with respect to biases of current layer
"""
#unpack cache
A_prev, W, b = cache
#Get number of samples
m = A_prev.shape[1]
dW = 1./m*np.dot(dZ, A_prev.T)
db = 1./m*np.sum(dZ, axis=1, keepdims=True)
dA_prev = np.dot(W.T, dZ)
assert (dA_prev.shape == A_prev.shape)
assert (dW.shape == W.shape)
assert (db.shape == b.shape)
return dA_prev, dW, db
def backward_activation(dA, Z, activation):
"""
Arguments:
dA -- post-activation gradient for current layer l
Z -- cached matrix from forward prop
activation -- the activation to be used in the layer
Returns:
dZ -- gradient of cost function with respect to Z[l]
"""
if activation == 'linear':
dZ = dA
elif activation == "relu":
dZ = np.array(dA, copy=True)
dZ[Z <= 0] = 0
elif activation == "sigmoid":
s = 1./(1+np.exp(-Z))
dZ = dA * s * (1-s)
elif activation == "leaky_relu":
dZ = np.array(dA, copy=True)
dZ[Z <= 0] = 0.01
elif activation == "tanh":
dZ = dA*(1 - tanh(Z)**2)
else:
raise NameError("%s is not a valid activation function" % (activation))
assert(dZ.shape == Z.shape)
return dZ
def backward_prop(AL, Y, caches, layer_activations):
"""
Implement a backward propagation pass
Arguments:
AL -- output of the forward propagation
Y -- ground truth
caches -- list of caches containing linear_cache and activation_cache
Returns:
grads -- A dictionary with the gradients dA[l], dW[l], db[l]
"""
#Define dict to store gradients for parameter update
grads = {}
L = len(caches)
m = AL.shape[1]
#Ensure Y is the same as AL (which is essentially y_hat)
Y = Y.reshape(AL.shape)
#Initialize backprop, a.k.a derivative of cost with respect to AL
dAL = -(np.divide(Y, AL) - np.divide(1 - Y, 1 - AL))
grads["dA"+str(L)] = dAL
for l in reversed(range(L)):
current_cache = caches[l]
linear_cache, activation_cache = current_cache
dZ = backward_activation(grads["dA"+str(l+1)],activation_cache, layer_activations[l])
dA_prev, dW, db = backward_linear(dZ, linear_cache)
grads["dA" + str(l)] = dA_prev
grads["dW" + str(l + 1)] = dW
grads["db" + str(l + 1)] = db
return grads
Update Parameters
The final step is to take the gradients computed in back propagation and use them to update the parameters $W$ and $b$.
The method of updating these parameters is important and there are several optimizers that do this in different ways.
- Mini-Batch Gradient Descent: $$ W:=W-\alpha dW $$ $$ b:=b-\alpha db $$
For the other optimization algorithms, the concept of exponentially weighted averages becomes an important one. An exponentially weighted average can be calculated with the following formula: $$v_{\theta, i} := \beta v_{\theta, i} + (1-\beta)\theta_{i}$$
Where $\theta_{i}$ are the samples in the dataset to average over. The parameter $\beta$ roughly controls how many samples to average over given by approximately $\frac{1}{1-\beta}$. Most commonly in momentum, $\beta=0.9$, which works out to averaging over the last 10 samples.
- Momentum: $$ \begin{cases} v_{dW^{[l]}} := \beta v_{dW^{[l]}} + (1 - \beta) dW^{[l]} \\ W^{[l]} := W^{[l]} - \alpha v_{dW^{[l]}} \end{cases}$$
$$\begin{cases} v_{db^{[l]}} := \beta v_{db^{[l]}} + (1 - \beta) db^{[l]} \\ b^{[l]} := b^{[l]} - \alpha v_{db^{[l]}} \end{cases}$$
- RMSProp: $$ \begin{cases} s_{dW^{[l]}} := \beta s_{dW^{[l]}} + (1 - \beta) (dW^{[l]})^{2} \\ W^{[l]} := W^{[l]} - \alpha \frac{dW^{[l]}}{\sqrt{s_{dW^{[l]}}}+\epsilon} \end{cases}$$
$$\begin{cases} s_{db^{[l]}} := \beta s_{db^{[l]}} + (1 - \beta) (db^{[l]})^{2} \\ b^{[l]} := b^{[l]} - \alpha \frac{db^{[l]}}{\sqrt{s_{db^{[l]}}}+\epsilon} \end{cases}$$
Note the addition of $\epsilon$ in the denominator in both RMSProp and Adam. That is to prevent NaNs or divisions by zero, it increases numerical stability. The king of the optimizers, Adam, works by combining both momentum and RMSProp. Additionally, it also adds bias correction to the exponentially weighted averages $v$ and $s$. The need for bias correction comes from the fact that as the number of samples that we average over increases, the beginning of the averaging causes the output to be very small since at the start we only have one sample and the others are initialized to zero. As such, the start of our averaging results in a much lower start than the original distribution.
- Adam: $$\begin{cases} v_{dW^{[l]}} := \beta_1 v_{dW^{[l]}} + (1 - \beta_1) dW^{[l]} \\ v^{corrected}{dW^{[l]}} = \frac{v{dW^{[l]}}}{1 - (\beta_1)^t} \\ s_{dW^{[l]}} := \beta_2 s_{dW^{[l]}} + (1 - \beta_2) (dW^{[l]})^2 \\ s^{corrected}{dW^{[l]}} = \frac{s{dW^{[l]}}}{1 - (\beta_2)^t} \\ W^{[l]} := W^{[l]} - \alpha \frac{v^{corrected}{dW^{[l]}}}{\sqrt{s^{corrected}{dW^{[l]}}} + \varepsilon} \end{cases}$$
$$\begin{cases} v_{db^{[l]}} := \beta_1 v_{db^{[l]}} + (1 - \beta_1) db^{[l]} \\ v^{corrected}{db^{[l]}} = \frac{v{db^{[l]}}}{1 - (\beta_1)^t} \\ s_{db^{[l]}} := \beta_2 s_{db^{[l]}} + (1 - \beta_2) (db^{[l]})^2 \\ s^{corrected}{db^{[l]}} = \frac{s{db^{[l]}}}{1 - (\beta_2)^t} \\ b^{[l]} := b^{[l]} - \alpha \frac{v^{corrected}{db^{[l]}}}{\sqrt{s^{corrected}{db^{[l]}}} + \varepsilon} \end{cases}$$
The $t$ parameter in Adam included in the bias correction formula is the number of steps taken.
Besides functions to update these parameters, we also need functions to initialize them (except for gradient descent)
## Gradient Descent
def update_parameters_gd(parameters, grads, learning_rate=0.01):
"""
Arguments:
parameters -- parameters W and b
grads -- gradients from backprop - dW and db
Returns:
parameters -- parameters W and b updated using gradient descent update rules
"""
L = len(parameters) // 2 # number of layers
for l in range(L):
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate*grads["dW"+str(l+1)]
parameters["b" + str(l+1)] = parameters["b" + str(l+1)]- learning_rate*grads["db"+str(l+1)]
return parameters
## Momentum
def initialize_parameters_momentum(parameters):
"""
Arguments:
parameters -- dictionary containing parameters W,b
Returns:
velocities -- initialized velocities for momentum updates
"""
L = len(parameters) // 2
velocities = {}
# Initialize velocities
for l in range(L):
velocities["dW" + str(l+1)] = np.zeros(parameters['W'+str(l+1)].shape)
velocities["db" + str(l+1)] = np.zeros(parameters['b'+str(l+1)].shape)
return velocities
def update_parameters_momentum(parameters, grads, velocities, learning_rate=0.01, beta=0.9):
"""
Arguments:
parameters -- parameters W and b
grads -- gradients from backprop - dW and db
velocities -- current velocities for momentum
Returns:
parameters -- parameters W and b updated using momentum update rules
velocities -- updated velocities
"""
L = len(parameters) // 2
for l in range(L):
# compute velocities using exponential weighted average
velocities["dW" + str(l+1)] = beta*velocities["dW"+str(l+1)]+(1-beta)*grads["dW"+str(l+1)]
velocities["db" + str(l+1)] = beta*velocities["db"+str(l+1)]+(1-beta)*grads["db"+str(l+1)]
#parameter update
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate*velocities["dW" + str(l+1)]
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate*velocities["db" + str(l+1)]
return parameters, velocities
## RMSProp
def initialize_parameters_rmsprop(parameters):
"""
Arguments:
parameters -- dictionary containing parameters W,b
Returns:
squares -- initialized moving average of the squared gradient for rmsprop updates
"""
L = len(parameters) // 2
squares = {}
# Initialize squares
for l in range(L):
squares["dW" + str(l+1)] = np.zeros(parameters['W'+str(l+1)].shape)
squares["db" + str(l+1)] = np.zeros(parameters['b'+str(l+1)].shape)
return squares
def update_parameters_rmsprop(parameters, grads, squares, learning_rate=0.01,
beta=0.9, epsilon=1e-8):
"""
Arguments:
parameters -- parameters W and b
grads -- gradients from backprop - dW and db
squares -- current squres of past gradients for rmsprop
Returns:
parameters -- parameters W and b updated using rmsprop update rules
squares -- updated squares
"""
L = len(parameters) // 2
for l in range(L):
# compute velocities using exponential weighted average
squares["dW" + str(l+1)] = beta*squares["dW"+str(l+1)]+(1-beta)*(grads["dW"+str(l+1)]**2)
squares["db" + str(l+1)] = beta*squares["db"+str(l+1)]+(1-beta)*(grads["db"+str(l+1)]**2)
#parameter update
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate*(grads["dW"+str(l+1)]/(np.sqrt(squares["dW" + str(l+1)])+epsilon))
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate*(grads["db"+str(l+1)]/(np.sqrt(squares["db" + str(l+1)])+epsilon))
return parameters, squares
## Adam
def initialize_parameters_adam(parameters):
"""
Arguments:
parameters -- dictionary containing parameters W,b
Returns:
velocities -- initialized first gradient weighted averages for adam updates
squares -- initialized moving average of the squared gradient for adam updates
"""
L = len(parameters) // 2
velocities = {}
squares = {}
# Initialize velocities and squares
for l in range(L):
velocities["dW" + str(l+1)] = np.zeros(parameters['W'+str(l+1)].shape)
velocities["db" + str(l+1)] = np.zeros(parameters['b'+str(l+1)].shape)
squares["dW" + str(l+1)] = np.zeros(parameters['W'+str(l+1)].shape)
squares["db" + str(l+1)] = np.zeros(parameters['b'+str(l+1)].shape)
return velocities, squares
def update_parameters_adam(parameters, grads, velocities, squares, t, learning_rate=0.01,
beta1=0.9, beta2=0.999, epsilon=1e-8):
"""
Arguments:
parameters -- dictionary with parameters W, b
grads -- dictionary with gradients dW, db
velocities -- moving average of the first gradient
squares -- moving average of the squared gradient
t -- counter for bias correction
Returns:
parameters -- updated parameters according to adam
velocities -- updated moving average of the first gradient
squares -- updated moving average of the squared gradient
"""
L = len(parameters) // 2
v_corrected = {}
s_corrected = {}
for l in range(L):
#Calculate exponentially weighted velocities
velocities["dW" + str(l+1)] = beta1*velocities["dW" + str(l+1)]+(1-beta1)*grads["dW" + str(l+1)]
velocities["db" + str(l+1)] = beta1*velocities["db" + str(l+1)]+(1-beta1)*grads["db" + str(l+1)]
#Bias correction for velocities
v_corrected["dW" + str(l+1)] = velocities["dW" + str(l+1)]/(1-beta1**t)
v_corrected["db" + str(l+1)] = velocities["db" + str(l+1)]/(1-beta1**t)
#Calculate exponentially weighted squares
squares["dW" + str(l+1)] = beta2*squares["dW" + str(l+1)]+(1-beta2)*grads["dW" + str(l+1)]**2
squares["db" + str(l+1)] = beta2*squares["db" + str(l+1)]+(1-beta2)*grads["db" + str(l+1)]**2
#Bias correction for squares
s_corrected["dW" + str(l+1)] = squares["dW" + str(l+1)]/(1-beta2**t)
s_corrected["db" + str(l+1)] = squares["db" + str(l+1)]/(1-beta2**t)
#Adam parameter updates
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate*(v_corrected["dW" + str(l+1)]/(np.sqrt(s_corrected["dW" + str(l+1)])+epsilon))
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate*(v_corrected["db" + str(l+1)]/(np.sqrt(s_corrected["db" + str(l+1)])+epsilon))
return parameters, velocities, squares
Combining Everything and Mini-Batch GD
After going through each piece, we now need to combine all these functions to train a model. To do this, we have some input data $X$ with respective labels $Y$. Now, to implement mini-bach gradient descent, we need to split $X$ and $Y$ into $m$ mini-batches to run our algorithms on.
def mini_batches(X, Y, mini_batch_size = 64, seed = 0):
"""
Arguments:
X -- input data
Y -- corresponding labels
mini_batch_size -- size of the mini-batches
seed -- used to set np.random.seed differently to get different shuffles
Returns:
mini_batches -- list of (mini_batch_X, mini_batch_Y)
"""
#Set seed
np.random.seed(seed)
mini_batches = []
#Get number of examples
m = X.shape[1]
idx = list(np.random.permutation(m))
shuffled_X = X[:, idx]
shuffled_Y = Y[idx, :]
shuffled_Y = np.reshape(shuffled_Y,(1,m))
assert shuffled_Y.shape == (1,m)
#Need to account for when minibatch size is divisible by m
num_full_minibatch = int(math.floor(m/mini_batch_size))
for i in range(0, num_full_minibatch):
mini_batch_X = shuffled_X[:,mini_batch_size*i: mini_batch_size*(i+1)]
mini_batch_Y = shuffled_Y[:,mini_batch_size*i: mini_batch_size*(i+1)]
mini_batches.append((mini_batch_X, mini_batch_Y))
# Now need to take care of extra examples of len < m
if m % mini_batch_size != 0:
mini_batch_X = shuffled_X[:,-(mini_batch_size-m):]
mini_batch_Y = shuffled_Y[:,-(mini_batch_size-m):]
mini_batches.append((mini_batch_X, mini_batch_Y))
return mini_batches
def train(X, Y, model_shape, layer_activations, optimizer, initialization_method='he', learning_rate = 0.001, mini_batch_size = 64, beta = 0.9,
beta1 = 0.9, beta2 = 0.999, epsilon = 1e-8, num_epochs = 10000, print_cost = True):
"""
Implementation of a Neural Network model.
Arguments:
X -- input data
Y -- labels
model_shape -- python list with the size of each layer
layer_activations -- python list with activation of each layer
optimizer -- string corresponding to optimizer to use. One of "gd","momentum","rmsprop","adam"
learning_rate -- the learning rate parameter
mini_batch_size -- the size of each mini batch
beta -- Momentum/RMSProp hyperparameter
beta1 -- decay of past gradients parameter for adam
beta2 -- decay of past squared gradients for adam
epsilon -- hyperparameter preventing division by zero in Adam and RMSProp updates
num_epochs -- number of epochs
print_cost -- True to print the cost every 5 epochs
Returns:
parameters -- trained parameters
"""
#Track costs
costs = []
#Adam bias correction parameter
t = 0
#define seed for np.random.seed in mini_batch call
seed = np.random.randint(1000)
#Number of layers and number of training examples
L = len(model_shape)
m = X.shape[1]
# Initialize parameters
parameters = initialize_parameters(model_shape, initialization_method=initialization_method)
# Initialize parameters for optimizer
if optimizer == "gd":
pass
elif optimizer == "momentum":
velocities = initialize_parameters_momentum(parameters)
elif optimizer == 'rmsprop':
squares = initialize_parameters_rmsprop(parameters)
elif optimizer == "adam":
velocities, squares = initialize_parameters_adam(parameters)
else:
raise NameError("%s is not a valid optimizer" % (optimizer))
#Loop
for i in range(num_epochs):
# Define the random minibatches. We increment the seed to reshuffle differently the dataset after each epoch
seed = seed + 1
minibatches = mini_batches(X, Y, mini_batch_size, seed)
#Get cost over all batchs
total_cost = 0
for minibatch in minibatches:
# Unpack
(minibatch_X, minibatch_Y) = minibatch
# Forward propagation pass
AL, caches = forward_prop(minibatch_X, layer_activations, parameters)
#Get minibatch cost
cost_batch = cost(AL, minibatch_Y)
#Add to total cost
total_cost+=cost_batch
# Backward propagation pass
grads = backward_prop(AL, minibatch_Y, caches, layer_activations)
# Update parameters
if optimizer == "gd":
parameters = update_parameters_gd(parameters, grads, learning_rate=learning_rate)
elif optimizer == "momentum":
parameters, velocities = update_parameters_momentum(parameters,grads,
velocities,learning_rate=learning_rate,
beta=beta)
elif optimizer == "rmsprop":
parameters, squares = update_parameters_rmsprop(parameters, grads, squares,
learning_rate=learning_rate, beta=beta,
epsilon=epsilon)
elif optimizer == "adam":
#Increment bias correction parameter
t = t + 1
parameters, velocities, squares = update_parameters_adam(parameters, grads,
velocities, squares,
t, learning_rate=learning_rate,
beta1=beta1, beta2=beta2,
epsilon=epsilon)
mean_cost = total_cost / float(mini_batch_size)
# Print the cost every 5 epoch
if print_cost and i % 5 == 0:
print ("Cost after epoch %i: %f" %(i, mean_cost))
if print_cost and i % 1 == 0:
costs.append(mean_cost)
# plot the cost
fig, ax = plt.subplots()
fig.set_facecolor('w')
fig.set_size_inches(12,9)
ax.plot(costs)
ax.set_ylabel('Cost')
ax.set_xlabel('Epoch')
plt.title("Learning rate = %s, Optimizer = %s" % (learning_rate, optimizer))
plt.show()
return parameters
Testing the Model
Now that the implementation is complete, let’s test the model by doing binary classification on two handwritten digits from the MNIST dataset.
from tensorflow.keras.datasets import mnist
(X_train, Y_train), (X_test, Y_test) = mnist.load_data()
img_shape = X_train.shape[1:]
print('X_train has shape %s\nY_train has shape %s'%(X_train.shape, Y_train.shape))
X_train has shape (60000, 28, 28)
Y_train has shape (60000,)
#Convert Y_train and Y_test to (m,1)
Y_train = Y_train.reshape(Y_train.shape[0],1)
Y_test = Y_test.reshape(Y_test.shape[0],1)
#Visualize one Entry
i = np.random.randint(X_train.shape[0])
fig,ax = plt.subplots()
fig.set_facecolor('w')
ax.imshow(X_train[i])
ax.set_title('Label = ' + str(Y_train[i]))
plt.show()

#Choose two classes for our classification model
class_a = 3 #Positive Class
class_b = 7 #Negative Class
#Filter out the dataset to include only images in those classes
idx = np.logical_or(np.squeeze(Y_train) == class_a, np.squeeze(Y_train) == class_b)
X_train, Y_train = X_train[idx], Y_train[idx]
#Assign class_a = 1 and class_b=0
Y_train[np.where(Y_train == class_a)] = 1.00
Y_train[np.where(Y_train == class_b)] = 0.00
print('X_train has shape %s\nY_train has shape %s'%(X_train.shape, Y_train.shape))
idx = np.logical_or(np.squeeze(Y_test) == class_a, np.squeeze(Y_test) == class_b)
X_test, Y_test = X_test[idx], Y_test[idx].astype(np.float64)
#Assign class_a = 1 and class_b=0
Y_test[np.where(Y_test == class_a)] = 1.00
Y_test[np.where(Y_test == class_b)] = 0.00
print('X_test has shape %s\nY_test has shape %s'%(X_test.shape, Y_test.shape))
X_train has shape (12396, 28, 28)
Y_train has shape (12396, 1)
X_test has shape (2038, 28, 28)
Y_test has shape (2038, 1)
#Reshape X_train and X_test into (m, 28*28)
X_train_flat = X_train.reshape(X_train.shape[0], -1).T
X_test_flat = X_test.reshape(X_test.shape[0], -1).T
# Standardize data to have feature values between 0 and 1.
X_train_norm = X_train_flat/255.
X_test_norm = X_test_flat/255.
print ("X_train's shape: " + str(X_train_norm.shape))
print ("X_test's shape: " + str(X_test_norm.shape))
X_train's shape: (784, 12396)
X_test's shape: (784, 2038)
Defining our Model
I’ve chosen to create a model to classify either a $3$ or a $7$. Now, let’s define a model.
The output is either $1$ or $0$, where $1$ corresponds to a $3$ and $0$ corresponds to a $7$. This means the last layer dimension needs to be $1$. For the first dimension, that should be $28\times28\times1=784$, since we’re taking the image and stacking each row of pixels ontop of each other (flattening). For our hidden layer, I’ll choose $n_h=7$ So we have a three layer model - $784\times7\times1$ with layer activations ReLU-ReLU-Sigmoid.
We can compare the performance of gradient descent versus adam optimization. Let’s start with gradient descent.
#Model Parameters
n_x = X_train_norm.shape[0]
n_y = 1
n_h = 7
model_shape = (n_x, n_h, n_y)
layer_activations = ['relu','relu','sigmoid']
optimizer = 'gd'
learning_rate = 0.0005
parameters = train(X_train_norm,Y_train, model_shape, layer_activations, optimizer,
learning_rate=learning_rate, mini_batch_size=128, num_epochs=17)
Cost after epoch 0: 0.458453
Cost after epoch 5: 0.259276
Cost after epoch 10: 0.162094
Cost after epoch 15: 0.085669

Evaluating our Model
Now that the model has trained, we need some way of assessing the performance of our model. This is done with our testing set: $(X_{\text{test}}, Y_{\text{test}})$ Essentially, we just need to feed $X_{\text{test}}$ through our model’s forward pass, which outputs $A^{[L]}=\hat{Y}$, our predictions. Then we simply compare $\hat{Y}$ with $Y_{\text{test}}$ and evaluate the accuracy as $A=\frac{\text{# correct}}{\text{# total}}$. Additionally, I’ll return the indices where the model predicted correctly, and where it predicted incorrectly, to visualize the model’s shortcomings.
def evaluate(X_test, Y_test, layer_activations, parameters, threshold=0.5):
"""
Evaluates performance of trained model on test set
Attributes:
X_test -- Test set inputs
Y_test -- Test set labels
layer_activations -- python list of strings corresponding to activation functions of layer l
parameters -- trained parameters W, b
Returns:
correct -- list of booleans corresponding to the indices of correct predictions
incorrect -- list of booleans correspondingin to the indices of incorrect predictions
"""
#Number of test samples
m = X_test.shape[1]
assert Y_test.shape == (1,m)
Y_pred, _ = forward_prop(X_test, layer_activations, parameters)
#Threshold
Y_pred[Y_pred>threshold]=1.
Y_pred[Y_pred<=threshold]=0
num_correct = np.sum(Y_pred == Y_test)
num_incorrect = m-num_correct
print("Accuracy: %f" % (float(num_correct)/m))
correct = Y_pred == Y_test
incorrect = Y_pred != Y_test
return np.squeeze(correct), np.squeeze(incorrect)
#Evaluate
correct, incorrect = evaluate(X_test_norm, Y_test.T, layer_activations, parameters)
#Get correect predictions
X_correct = X_test[correct]
Y_correct = Y_test[correct]
#Get incorrect predictions
X_incorrect = X_test[incorrect]
Y_incorrect = Y_test[incorrect]
fig,ax = plt.subplots(3,2)
fig.set_size_inches(12,18)
fig.set_facecolor('w')
i_correct = np.random.randint(len(X_correct), size=3)
i_incorrect = np.random.randint(len(X_incorrect), size=3)
for i in range(3):
ax[i,0].imshow(X_correct[i_correct[i]])
ax[i,0].set_title("%i: Correctly predicted Y=%i"%(i_correct[i],class_a*Y_correct[i_correct[i]][0] + (1-Y_correct[i_correct[i]][0])*class_b))
ax[i,1].imshow(X_incorrect[i_incorrect[i]])
ax[i,1].set_title("%i: Incorrectly predicted Y=%i"%(i_incorrect[i],class_b*Y_incorrect[i_incorrect[i]][0] + (1-Y_incorrect[i_incorrect[i]][0])*class_a))
ax[i,0].xaxis.set_visible(False)
ax[i,0].yaxis.set_visible(False)
ax[i,1].xaxis.set_visible(False)
ax[i,1].yaxis.set_visible(False)
plt.show()
Accuracy: 0.964671

Adam Optimization
Now that we’ve gotten results using Gradient Descent, Let’s compare it with adam optimization
#Model Parameters
n_x = X_train_norm.shape[0]
n_y = 1
n_h = 7
model_shape = (n_x, n_h, n_y)
layer_activations = ['relu','relu','sigmoid']
optimizer = 'adam'
learning_rate = 0.0005
parameters = train(X_train_norm,Y_train, model_shape, layer_activations, optimizer,
learning_rate=learning_rate, mini_batch_size=128, num_epochs=5)
Cost after epoch 0: 0.347253

#Evaluate
correct, incorrect = evaluate(X_test_norm, Y_test.T, layer_activations, parameters)
#Get correect predictions
X_correct = X_test[correct]
Y_correct = Y_test[correct]
#Get incorrect predictions
X_incorrect = X_test[incorrect]
Y_incorrect = Y_test[incorrect]
fig,ax = plt.subplots(3,2)
fig.set_size_inches(12,18)
fig.set_facecolor('w')
i_correct = np.random.randint(len(X_correct), size=3)
i_incorrect = np.random.randint(len(X_incorrect), size=3)
for i in range(3):
ax[i,0].imshow(X_correct[i_correct[i]])
ax[i,0].set_title("%i: Correctly predicted Y=%i"%(i_correct[i],class_a*Y_correct[i_correct[i]][0] + (1-Y_correct[i_correct[i]][0])*class_b))
ax[i,1].imshow(X_incorrect[i_incorrect[i]])
ax[i,1].set_title("%i: Incorrectly predicted Y=%i"%(i_incorrect[i],class_b*Y_incorrect[i_incorrect[i]][0] + (1-Y_incorrect[i_incorrect[i]][0])*class_a))
ax[i,0].xaxis.set_visible(False)
ax[i,0].yaxis.set_visible(False)
ax[i,1].xaxis.set_visible(False)
ax[i,1].yaxis.set_visible(False)
plt.show()
Accuracy: 0.969578

Comparison
As we can see, using the adam optimizer yielded better accuracy in nearly one third of the number of epochs.
Francisco Farinha
Data Scientist @ BlackBerry
Interested in solving real-world problems using Machine Learning techniques.